箱中取物在自動化中有著越來越多的使用場景,然而“箱中隨機取物”是自動化領域中最難的任務之一。





困難之處而是由于機械手必須識別不同的、混亂排列的、甚至是具有復雜幾何形狀的物體,將它們從容器中移出而不發生碰撞,放到定向位置并傳遞給機器。而調整部件、箱子和夾具之間的協作需要操作人員具有豐富的經驗和充足的專業知識。
因此,對客戶而言,實現箱中取物解決方案是一項重大的技術挑戰而且日益重要。但是,若系統具有學習能力,能夠在設置時甚至在運行過程中獨立調整參數,又是怎樣的情況呢?作為自動化解決方案的領先制造商,利勃海爾愛茵根工廠已經解決了這個問題,并尋找到一個得力的幫手。
通過人工智能技術 (AI)
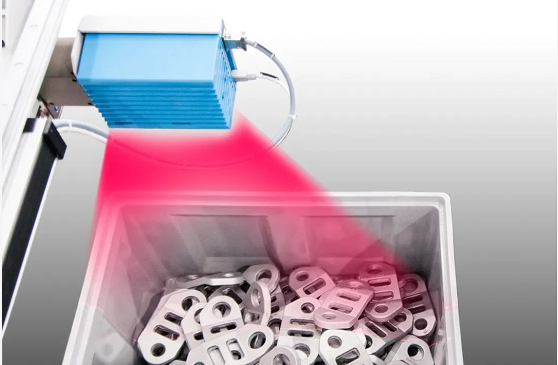
利勃海爾愛茵根工廠藉由AI,成功研發出 LHRobotics.Vision技術為用戶顯著簡化了箱中取物操作。該技術包除了包含圖形引導的、可直觀操作的軟件外,還包括一個基于投影儀的3D 攝像系統。
這樣就可以通過評估三維立體視覺圖像來實現物體的圖像識別。由部件的三維數據和真實箱體內的干擾輪廓生成一個點云,作為無碰撞提取部件的軌跡規劃基礎,可以輕松地在軟件中以圖形方式確定部件上所需的抓取點,而無需對機械手進行復雜的示教。
借助物理引擎模擬工具LHRobotics.Vision Sim使得用戶能夠以純虛擬的方式調整夾具的幾何形狀并優化流程,以實現更好的抓取。
此外,借助系統在真實掃描數據的基礎上生成測試路徑,以借此確定最佳設置參數。這簡化了流程并節省了時間和成本。
電動汽車領域中的應用
目前利勃海爾,已經在視覺系統上建立了人工智能,在電動汽車領域中用于實現柔性電纜連接的過程安全和自動對接,例如電動汽車電池組的模塊連接器等等。