螺旋錐齒輪是核心傳動元件,廣泛應(yīng)用于車輛、飛機(jī)和船舶等裝備。在傳遞動力的過程中,傳動系統(tǒng)受載變形會導(dǎo)致齒輪副的嚙合狀態(tài)產(chǎn)生偏移,影響齒輪副的傳動性能。通常要結(jié)合齒輪副的嚙合錯(cuò)位結(jié)果開展齒面設(shè)計(jì)與修形。因此快速準(zhǔn)確分析傳動系統(tǒng)的嚙合錯(cuò)位情況,對評估齒輪副的加載嚙合性能和優(yōu)化齒面設(shè)計(jì)非常重要。
國內(nèi)外學(xué)者對齒輪傳動系統(tǒng)的嚙合錯(cuò)位量分析方法進(jìn)行了大量的研究。王欽等建立了多支撐軸系耦合分析模型,綜合考慮軸承剛度、齒輪、軸和殼體的影響求解齒輪嚙合錯(cuò)位量,并通過實(shí)驗(yàn)進(jìn)行驗(yàn)證。高潔等綜合考慮了機(jī)匣、軸系及軸承的支撐變形對齒輪軸線偏移的影響對當(dāng)量錯(cuò)位量疊加,在此基礎(chǔ)上對弧齒錐齒輪齒面修形。覃秋霞等考慮了機(jī)匣的加工誤差、軸承的過盈配合等因素建立嚙合錯(cuò)位量計(jì)算模型,基于計(jì)算結(jié)果對弧齒錐齒輪齒面進(jìn)行設(shè)計(jì),用實(shí)驗(yàn)驗(yàn)證嚙合錯(cuò)位后的印痕和傳動誤差。賴長發(fā)等借助 Masta 軟件建立了驅(qū)動主減速器的仿真分析模型計(jì)算螺旋錐齒輪的嚙合錯(cuò)位量,將仿真分析結(jié)果與實(shí)驗(yàn)作對比。然而為了快速獲得計(jì)算結(jié)果,上述研究在分析傳動軸的變形時(shí),大多將傳動軸簡化為梁單元模型。但這種簡化處理忽略了歐拉梁、鐵木辛柯梁理論推導(dǎo)的假設(shè)條件,當(dāng)傳動軸結(jié)構(gòu)復(fù)雜時(shí),其變形分析結(jié)果可能會產(chǎn)生較大的誤差,導(dǎo)致齒輪傳動系統(tǒng)的嚙合錯(cuò)位量計(jì)算不準(zhǔn)確,從而影響齒面優(yōu)化設(shè)計(jì)效果。
針對以上問題,本文提出一種基于實(shí)體有限元法的分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法。該方法考慮軸承剛度和齒輪嚙合力的影響,采用實(shí)體有限元模型進(jìn)行傳動軸的變形分析保證齒輪副嚙合錯(cuò)位量計(jì)算的準(zhǔn)確性,以此為基礎(chǔ)建立包含嚙合錯(cuò)位影響的輪齒加載接觸分析以大幅度提高計(jì)算分析效率。
一、齒輪副嚙合錯(cuò)位量計(jì)算
嚙合錯(cuò)位量的定義
齒輪傳動系統(tǒng)包括軸、軸承和齒輪等零件,且結(jié)構(gòu)復(fù)雜。傳動系統(tǒng)工作時(shí),齒輪副的嚙合力傳遞到軸和軸承上,導(dǎo)致系統(tǒng)產(chǎn)生變形,從而使齒輪的相對安裝位置發(fā)生偏移。齒輪副在載荷作用下安裝位置的偏移量即為齒輪副的嚙合錯(cuò)位量,如圖 1 所示。
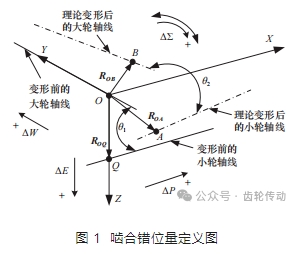
軸交錯(cuò)點(diǎn)變形前為 O、Q,變形后為A、B 。齒輪軸線變形前用細(xì)實(shí)線表示,理論變形后用點(diǎn)劃線表示,ROA、ROB、ROQ 是點(diǎn)O 到 A、B、Q的向量。軸交錯(cuò)點(diǎn)的偏移矢量為
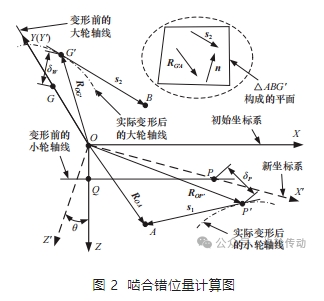
將其分解到初始齒輪坐標(biāo)系中,則嚙合錯(cuò)位量的計(jì)算公式為
式中:?P為齒輪副沿小輪軸向的相對位移量;?W 為沿大輪軸向的相對位移量;?E為沿偏置方向的相對位移量;?Σ為沿軸交角方向的相對變化量;i、j、k為初始坐標(biāo)系中坐標(biāo)軸的單位矢量;θ1、θ2 為變形前后的軸交角。
嚙合錯(cuò)位量的計(jì)算方法
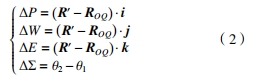
圖 2 所示為齒輪副嚙合錯(cuò)位量的計(jì)算原理圖。初始坐標(biāo)系Σq = {O; x, y,z} x、y、z為X、Y、Z軸的矢量;彎矩坐標(biāo)系Σqy = {O; x ′, y ′,z ′} x ′、y ′、z為X ′、 Y ′、Z ′軸的矢量。
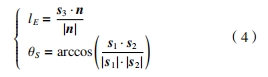
P、G 是變形前小、大齒輪齒寬中點(diǎn)在齒輪軸線上的投影點(diǎn)。受載變形后點(diǎn) P、G 變成了點(diǎn)P ′、G ′ ,δP、δW分別是點(diǎn) P到P ′ 以及G 到 G ′ 的距離。實(shí)際變形后軸線變成曲線用點(diǎn)劃線表示,在點(diǎn)P ′、G ′處分別作兩條曲線的切線,其方向向量為s1 和 s2。則兩個(gè) 方向向量的法矢 n 為
設(shè)s3 是點(diǎn) P ′ 和 G ′連線的矢量,設(shè)向量 s1和 s2之間的距離為lE 和角度為θS ,計(jì)算公式為
設(shè)小輪等效軸線上點(diǎn)A 與 P ′之間的距離為lP2,則建立包含 lP2 的方程表達(dá)式為
式中:ROP′為點(diǎn)O 和 P ′連線的矢量。
構(gòu)建包含向量 s2 和法向量 n 的平面,其中點(diǎn) A、B、G ′ 在該平面內(nèi),則RG′A 滿足
式中:ROG′ 為點(diǎn)O 和G′ 連線的矢量;RG′A 為點(diǎn)G ′ 和 A 連線的矢量。
設(shè)大輪等效軸線上點(diǎn)B 與 G ′ 之間的距離為 lW2,計(jì)算公式為
將系統(tǒng)變形前后的參數(shù)疊加,獲得齒輪副的嚙合錯(cuò)位量。
式中:RQP 為點(diǎn) Q和 P連線的矢量;ROG為點(diǎn)O 和 G 連線的矢量。
二、不同計(jì)算模型的傳動軸變形分析對比
傳動軸的受載變形是導(dǎo)致齒輪副嚙合錯(cuò)位的主要影響因素,因此準(zhǔn)確計(jì)算傳動軸的變形量至關(guān)重要。傳動軸大多簡化為梁單元模型,其變形分析原理如圖 3 所示。
根據(jù)傳動軸的截面情況將其分段,用兩個(gè)節(jié)點(diǎn)和一個(gè)梁單元表示相同截面的軸段。整根傳動軸則可表示為由若干個(gè)不同截面的梁單元組合,其節(jié)點(diǎn)個(gè)數(shù)比單元個(gè)數(shù)多 1。每個(gè)節(jié)點(diǎn)包含 6 個(gè)自由度, 因此每個(gè)相同截面的梁單元可以用一個(gè) 12×12 的剛度矩陣表示。
將整根傳動軸中每一段兩節(jié)點(diǎn)的梁單元?jiǎng)偠染仃囘M(jìn)行疊加,得到整根傳動軸的總剛度矩陣如下:
式中:K(n−1)n為 2×2 的剛度矩陣;矩陣 K(n−1)n包含![]() 是節(jié)點(diǎn) (n−1)和 n所在梁單元中在節(jié)點(diǎn) n−1處的剛度;
是節(jié)點(diǎn) (n−1)和 n所在梁單元中在節(jié)點(diǎn) n−1處的剛度;![]() 為節(jié)點(diǎn)n處的剛度;A(n−1)n、An(n−1)為耦合剛度,且每個(gè)剛度都是 6×6 的矩陣,其余剛度以此類推。
為節(jié)點(diǎn)n處的剛度;A(n−1)n、An(n−1)為耦合剛度,且每個(gè)剛度都是 6×6 的矩陣,其余剛度以此類推。
根據(jù)力與變形之間的關(guān)系,構(gòu)建梁的力平衡方程如下:
式中:Fn 為節(jié)點(diǎn)n處的載荷子矩陣;δn為變形子矩陣,兩者都為 6×6 的矩陣。
已知外力和總剛度矩陣,通過平衡方程計(jì)算出梁單元在各節(jié)點(diǎn)上的變形量。
以某個(gè)復(fù)雜傳動軸為例,首先根據(jù)傳動軸的軸段數(shù)量來確定梁單元的初始節(jié)點(diǎn)數(shù)目,然后以載荷施加位置、邊界條件及軸的變形提取位置進(jìn)一步增加節(jié)點(diǎn)數(shù)量,最后通過這些節(jié)點(diǎn)去建立完整的梁單元模型如圖 4 所示。節(jié)點(diǎn) 2 和節(jié)點(diǎn) 16 是支撐位置。節(jié)點(diǎn) 5~節(jié)點(diǎn) 9 是位移變形量的提取位置,節(jié)點(diǎn) 7 為載荷施加位置,其余節(jié)點(diǎn)是軸段的分界位置。

軸的材料為 20CrMnTi,泊松比為 0.3。在節(jié)點(diǎn) 7 處施加 3 個(gè)方向上的集中力,分別為 1 700、1 200、2 000 N。在節(jié)點(diǎn) 2 和節(jié)點(diǎn) 16 處添加邊界條件,需要約束除了軸線回轉(zhuǎn)方向之外的其余 5 個(gè)自由度。
為了對比不同模型分析軸變形的誤差情況。同時(shí)按照圖 4 的結(jié)構(gòu)去構(gòu)建軸的實(shí)體有限元模型,其材料、受力情況以及邊界條件與梁單元模型的設(shè)置相同。通過靜力學(xué)分析得到兩種計(jì)算模型傳動軸的變形如圖 5 所示。
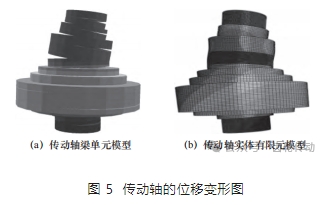
為了直觀地對比兩種模型的傳動軸變形情況,提取軸線上節(jié)點(diǎn)的變形量,見表 1。

由表 1 可知,采用梁單元模型計(jì)算的傳動軸變形量在各方向上與實(shí)體有限元模型相比均存在一定誤差,徑向方向(Xb、Yb)誤差約 13%~16%,沿軸線方向(Zb)誤差更大,約 30%。因此傳動軸結(jié)構(gòu)復(fù)雜時(shí),不能用梁單元模型代替實(shí)體有限元模型去分析其受載變形情況。這種誤差可能來源于梁單元模型受載變形后的梁截面與軸線關(guān)系的假設(shè)。
三、分步式嚙合錯(cuò)位分析模型
綜上所述,采用梁單元模型計(jì)算傳動軸受載變形會在各方向上產(chǎn)生較大誤差。為了提高變形分析的準(zhǔn)確度,有學(xué)者研究通過實(shí)體有限元構(gòu)建包含傳動軸、齒輪以及軸承的傳動系統(tǒng)全有限元模型,通過接觸對定義齒面的嚙合關(guān)系進(jìn)行系統(tǒng)嚙合錯(cuò)位的分析。這種方法能較好地提高計(jì)算精度,但是網(wǎng)格數(shù)量多,劃分困難,非常耗費(fèi)計(jì)算資源。為了保證計(jì)算分析的準(zhǔn)確性,同時(shí)提高計(jì)算效率,本文提出一種基于實(shí)體有限元法的分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法:僅將傳動軸構(gòu)建為實(shí)體有限元模型,軸承等效為剛度矩陣耦合于傳動軸上;將齒輪副傳遞的載荷等效為嚙合力;采用靜力學(xué)有限元法分析傳動軸變形,進(jìn)而計(jì)算齒輪副的嚙合錯(cuò)位量;根據(jù)嚙合錯(cuò)位量構(gòu)建輪齒的加載接觸分析模型分析齒面的接觸偏移情況。
傳動軸耦合分析模型
首先建立包含軸承影響的傳動軸變形耦合分析模型,如圖 6 所示。依據(jù)傳動軸不同軸段去劃分網(wǎng)格,為了減少網(wǎng)格數(shù)量,全部劃分為六面體單元。再根據(jù)軸承安裝位置、嚙合力施加位置以及變形量提取位置對網(wǎng)格進(jìn)行調(diào)整。
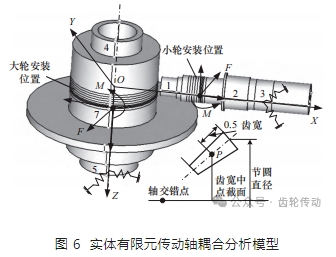
圖 6 中軸段 1~5 為軸承安裝位置,將這些軸段上軸承等效受力點(diǎn)處建立導(dǎo)向點(diǎn),并將軸承與對應(yīng)軸段上表面網(wǎng)格進(jìn)行耦合。考慮軸承的彈性特征可以用彈簧來等效。每個(gè)導(dǎo)向點(diǎn)會通過 5 個(gè)彈簧約束其除回轉(zhuǎn)方向之外的 5 個(gè)運(yùn)動自由度,每個(gè)導(dǎo)向點(diǎn)在各方向彈簧的剛度由軸承的剛度矩陣中主對角元的數(shù)值確定。
軸段 6 和軸段 7 為大、小齒輪安裝位置,在該軸段需要施加齒輪嚙合力,同時(shí)需要提取傳動軸受載變形量。通常將齒寬中部的節(jié)點(diǎn)位置定義為接觸區(qū)的中心位置。若將嚙合力施加在傳動軸上時(shí),會在齒寬中點(diǎn) P 處切割出一個(gè)軸截面(P 點(diǎn)的位置如圖 6 所示),在軸心位置建立導(dǎo)向點(diǎn)并與截面耦合,并在該導(dǎo)向點(diǎn)上添加嚙合力和彎矩。另外將該軸段等分切割成若干個(gè)子軸段,按照從左到右的順序依次在軸心位置建立若干個(gè)導(dǎo)向點(diǎn)并與對應(yīng)的軸截面耦合。通過以上處理,齒輪在安裝位置的變形可由各導(dǎo)向點(diǎn)的位移表示。
等效嚙合力計(jì)算
為了減少齒面接觸分析的計(jì)算量,將齒輪接觸作用等效為嚙合力。根據(jù)傳動扭矩計(jì)算節(jié)點(diǎn)處的切向力Fmt,考慮螺旋錐齒輪參數(shù)進(jìn)一步計(jì)算出軸向力 Fax和徑向力 Frd。以上計(jì)算的嚙合力是作用在齒面上的,而 3.1 節(jié)所述的計(jì)算模型其嚙合力作用于軸線上。力的作用點(diǎn)改變后需要采用力的平移定理重新計(jì)算載荷。其中徑向力朝著軸心位置平移不產(chǎn)生彎矩,切向力產(chǎn)生繞軸線回轉(zhuǎn)方向的彎矩不影響變形,軸向力產(chǎn)生其余方向彎矩會影響變形。
小輪坐標(biāo)系 ΣP={Q; xP, yP, zP}與初始坐標(biāo)系 Σq 在 z 方向的距離為偏置距,xP 是小輪回轉(zhuǎn)軸,小輪軸向力產(chǎn)生 zP 方向的彎矩:
當(dāng)齒輪副的偏置距為 0 時(shí),大輪的彎矩計(jì)算方式與小輪相同。但偏置距不為 0 時(shí),大輪軸向力產(chǎn) 生彎矩的方向與 z 方向有一定的角度,則在大輪軸心導(dǎo)向點(diǎn)處的彎矩坐標(biāo)系Σqy 與嚙合力坐標(biāo)系Σq 不同。為了避免在同一個(gè)導(dǎo)向點(diǎn)施加嚙合力和彎矩需要添加兩個(gè)不同的坐標(biāo)系問題,以彎矩坐標(biāo)系Σqy 為主,將切向力和徑向力分解到坐標(biāo)系Σqy 中,計(jì)算公式為
式中:FX′、FZ' 為坐標(biāo)系Σqy 中 x ′與 z'方向的力;MZ ′ 為 z'方向的彎矩。
在小輪坐標(biāo)系 ΣP中齒寬中點(diǎn)所在軸截面的導(dǎo)向點(diǎn)處施加嚙合力與彎矩;在大輪坐標(biāo)系 Σqy 中齒寬中點(diǎn)所在軸截面的導(dǎo)向點(diǎn)處施加嚙合力與彎矩。
考慮嚙合錯(cuò)位的輪齒加載接觸分析
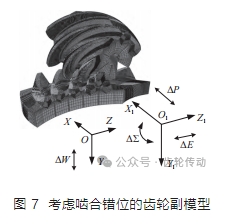
將 3.2 節(jié)計(jì)算的等效嚙合力代入 3.1 節(jié)所述的傳動軸變形耦合分析模型,導(dǎo)出該模型中傳動軸軸線上多個(gè)導(dǎo)向點(diǎn)的位移變形量,將其代入 1.2 節(jié)的公式求出系統(tǒng)的嚙合錯(cuò)位量。通過嚙合錯(cuò)位量去調(diào)整多齒嚙合模型中齒輪的位置及姿態(tài)。首先將大輪沿著全局坐標(biāo)系的Y 軸移動?W,然后以大輪為基準(zhǔn)將小輪分別沿著局部坐標(biāo)系的 X1、Z1軸分別移動 ?P、?E,最后將小輪繞軸 Y1旋轉(zhuǎn) ?Σ,從而構(gòu)建出包含嚙合錯(cuò)位的輪齒加載接觸分析模型,如圖 7 所示。
輪齒齒面通過接觸對建立嚙合作用。在大小齒輪寬中部的軸線中心建立載荷作用參考點(diǎn),分別與齒輪的輪轂面建立耦合作用以便施加載荷。大輪參考點(diǎn)施加工作扭矩,小輪參考點(diǎn)施加轉(zhuǎn)角,同時(shí)約束除齒輪回轉(zhuǎn)自由度外的其余自由度。采用靜力分析方法進(jìn)行計(jì)算,則可獲得某嚙合瞬時(shí)齒面的接觸狀態(tài)以及齒輪的實(shí)際轉(zhuǎn)角。改變小輪轉(zhuǎn)角進(jìn)行多步計(jì)算,則可得整個(gè)嚙合過程中齒輪副的加載傳動誤差及接觸印痕。
四、計(jì)算實(shí)例
嚙合錯(cuò)位量計(jì)算對比
為了檢驗(yàn)本文提出的實(shí)體有限元法分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法的準(zhǔn)確性,以某客車驅(qū)動橋?yàn)槔M(jìn)行齒輪副嚙合錯(cuò)位分析。其中螺旋錐齒輪基本參數(shù)見表 2。

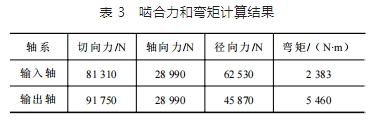
齒輪副的額定工作扭矩為 15 000 N·m,利用 3.2 節(jié)所述的計(jì)算公式得到嚙合力和彎矩計(jì)算結(jié)果,見表 3。
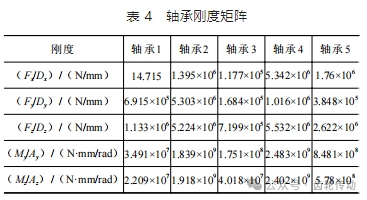
參考多支撐軸系中軸承單元?jiǎng)偠扔?jì)算公式[11] 計(jì)算傳動系統(tǒng)中軸承剛度矩陣,導(dǎo)出各軸承剛度矩陣中在主對角元上的數(shù)值,見表 4。
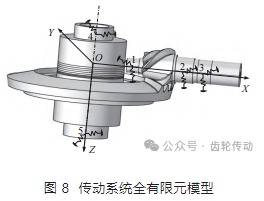
采用上述參數(shù)與傳動軸圖紙可以建立傳動軸耦合分析有限元模型,計(jì)算獲得傳動軸的變形量及齒輪副的嚙合錯(cuò)位量。同時(shí)建立圖 8 所示的傳動系統(tǒng)全有限元模型與本文方法做對比分析。由于齒輪與傳動軸結(jié)合部位六面體網(wǎng)格劃分困難,因此輪齒部分采用四面體進(jìn)行網(wǎng)格劃分。該模型中的材料屬性、傳動軸的設(shè)置方式與 3.1 節(jié)所述模型相同。齒面嚙合作用參考 3.3 節(jié)接觸對設(shè)置。添加邊界條件時(shí),需注意在施加工作扭矩和轉(zhuǎn)角的參考點(diǎn)處約束自由度,除了軸線回轉(zhuǎn)自由度外,其余自由度將由軸承的等效彈簧約束。
同時(shí)以梁單元構(gòu)建傳動系統(tǒng)模型進(jìn)行系統(tǒng)的嚙合錯(cuò)位分析,分別提取三種模型傳動軸軸線上節(jié)點(diǎn)處的變形量。其中全有限元模型齒輪嚙合位置是時(shí)刻變化的,因此提取五齒模型中第三齒在節(jié)點(diǎn)嚙合時(shí)的變形量。最終繪制出傳動軸的變形結(jié)果,如圖 9 所示。
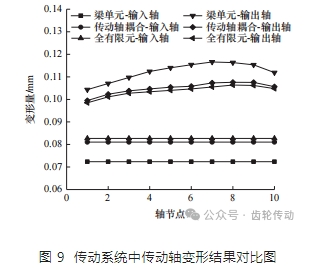
對比分析梁單元模型與全有限元模型的傳動軸變形結(jié)果,其平均誤差輸入軸約為 12.4%、輸出軸約為 10.2%。比較實(shí)體有限元傳動軸耦合分析模型與全有限元模型的傳動軸變形結(jié)果,其平均誤差輸入軸約為 1.9%、輸出軸約為 1.2%。考慮到梁單元計(jì)算結(jié)果誤差較大,將傳動軸的變形量代入 1.2 節(jié) 的計(jì)算公式得到錯(cuò)位量,見表 5。
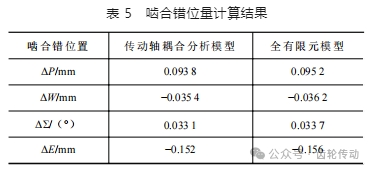
由表 5 可知,傳動軸耦合分析模型與全有限元模型的嚙合錯(cuò)位量誤差在 2.5% 以內(nèi)。
加載印痕和傳動誤差對比
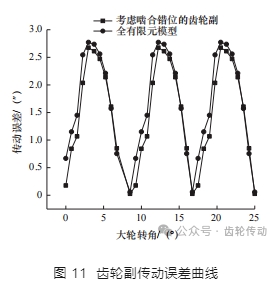
將每一嚙合瞬時(shí)的齒面接觸位置的應(yīng)力提出疊加到齒面上可獲得齒面的加載接觸印痕,本文所述方法計(jì)算的加載印痕如圖 10a 所示,全有限元模型計(jì)算的加載印痕如圖 10b 所示,兩者的傳動誤差結(jié)果如圖 11 所示。
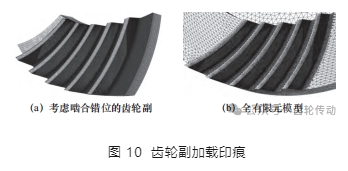
由圖 11 可知,分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法得到的加載印痕與全有限元模型計(jì)算的加載印痕位置及形狀均一致,僅在齒寬方向有細(xì)微差異,其加載傳動誤差曲線形態(tài)吻合,幅值偏差在 1.3% 左右。
分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法分為兩部分:傳動軸耦合變形分析模型部分的網(wǎng)格數(shù)約為 18.5 萬;考慮嚙合錯(cuò)位的輪齒加載接觸分析模型網(wǎng)格數(shù)約為 80.4 萬(齒面接觸部分網(wǎng)格大小為 0.2 mm)。全有限元模型網(wǎng)格數(shù)量約為 308 萬(齒面接觸部分網(wǎng)格大小為 0.4 mm)。統(tǒng)計(jì)兩種分析模型的計(jì)算時(shí)間,見表 6。
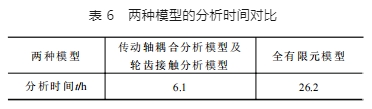
由表 6 可知,分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法的分析時(shí)間相比全有限元模型大幅減少。若將全有限元模型的齒面網(wǎng)格劃分為 0.2 mm,則分析時(shí)間還將進(jìn)一步增加。
五、結(jié)語
針對傳動軸結(jié)構(gòu)復(fù)雜時(shí)采用梁單元模型求解軸的變形差異較大,會導(dǎo)致齒輪副嚙合錯(cuò)位分析不準(zhǔn)確的問題,本文提出一種基于實(shí)體有限元法的分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法。通過理論研究以及仿真分析得出以下結(jié)論:
(1)傳動軸模型結(jié)構(gòu)復(fù)雜時(shí),采用梁單元模型求解軸的受載變形與實(shí)體有限元模型計(jì)算結(jié)果存在較大誤差。
(2)提出的基于實(shí)體有限元模型的傳動軸變形耦合分析模型,綜合考慮了齒輪嚙合力作用以及傳動軸結(jié)構(gòu)柔性與軸承支撐柔性耦合狀況,能夠更為準(zhǔn)確地分析螺旋錐齒輪傳動系統(tǒng)傳動軸的受載變形情況。
(3)提出的基于實(shí)體有限元法的分步螺旋錐齒輪傳動系統(tǒng)嚙合錯(cuò)位分析方法能夠準(zhǔn)確分析齒輪副的加載印痕及傳動誤差,在保證計(jì)算精度的同時(shí),計(jì)算效率明顯提升。
參考文獻(xiàn)略.