在我國工業(yè)互聯(lián)網(wǎng)的持續(xù)發(fā)展背景下,各大工業(yè)企業(yè)針對(duì)各自領(lǐng)域提出了“智能運(yùn)維”策略。高端裝備產(chǎn)業(yè)被視為國家戰(zhàn)略性產(chǎn)業(yè)和工業(yè)崛起的標(biāo)志,對(duì)國家工業(yè)發(fā)展具有關(guān)鍵作用。例如船舶動(dòng)力、高端數(shù)控機(jī)床和工業(yè)機(jī)器人,均配備了預(yù)測、感知、分析、推理、決策和控制等先進(jìn)功能。這些產(chǎn)業(yè)的智能化轉(zhuǎn)型對(duì)智能運(yùn)維服務(wù)技術(shù)有高度依賴,尤其需要進(jìn)行復(fù)雜的機(jī)械裝備故障智能診斷,以實(shí)時(shí)發(fā)現(xiàn)故障、防止其惡化,并提供維修決策支持,從而顯著提高設(shè)備的安全性和可靠性。為了解決因高端裝備復(fù)雜度而帶來的物理模型建模難題,滿足高端裝備運(yùn)維任務(wù)的智能化和網(wǎng)絡(luò)化需求,本文從數(shù)據(jù)挖掘的角度出發(fā),利用 MATLAB 和 Python 較強(qiáng)的數(shù)據(jù)處理能力,將現(xiàn)代信號(hào)處理方法與人工智能相關(guān)技術(shù)相結(jié)合,重點(diǎn)進(jìn)行了高端裝備智能運(yùn)維 PHM 軟件系統(tǒng)的開發(fā)。以船舶發(fā)動(dòng)機(jī)為例,筆者驗(yàn)證了該系統(tǒng)在變工況條件下對(duì)健康狀態(tài)監(jiān)測故障診斷的性能。
一、智能運(yùn)維 PHM 系統(tǒng)設(shè)計(jì)與關(guān)鍵技術(shù)
智能運(yùn)維 PHM 系統(tǒng)功能模式
狀態(tài)監(jiān)測:利用無鍵相傳感器技術(shù)、現(xiàn)代信號(hào)處理算法,有效監(jiān)測高端裝備的關(guān)鍵熱工參數(shù)(例如溫度、壓力、扭矩、功率、能量損耗)和振動(dòng)信號(hào)、油液磨粒、瞬時(shí)轉(zhuǎn)速,實(shí)現(xiàn)信號(hào)采集、數(shù)據(jù)預(yù)處理和特征提取。
故障診斷:本文針對(duì)變工況條件下傳統(tǒng)模型難以進(jìn)行故障診斷的問題,提出了一種新型的深度卷積神經(jīng)網(wǎng)絡(luò)模型,稱為多分支注意力機(jī)制卷積神經(jīng)(Multi-Branch Attention Mechanism Convolution Neural Network,MBAM-CNN)。該模型基于卷積神經(jīng)網(wǎng)絡(luò),仿照人類視覺注意力選擇機(jī)制(Attention Mechanism,AM),通過采集信號(hào)和提取的故障特征進(jìn)行離線或在線診斷,以確定故障診斷類型。
健康評(píng)估:為了準(zhǔn)確評(píng)估和描述系統(tǒng)的健康狀態(tài),筆者將評(píng)估結(jié)果與健康等級(jí)描述相關(guān)聯(lián)。將健康狀態(tài)等級(jí)劃分為健康、良好、注意、劣化和危險(xiǎn) 5 個(gè)等級(jí)。
故障預(yù)測:故障預(yù)測模塊根據(jù)裝備的當(dāng)前使用狀態(tài),結(jié)合裝備的結(jié)構(gòu)特性、歷史故障記錄以及狀態(tài)特征的監(jiān)測數(shù)據(jù),同時(shí)考慮特征趨勢變化和未來工作環(huán)境條件來確定和預(yù)測故障的類型、發(fā)展趨勢和可能帶來的后果,為維修決策模塊提供信息支持。
智能運(yùn)維 PHM 系統(tǒng)軟件架構(gòu)介紹
智能運(yùn)維 PHM 系統(tǒng)軟件流程如下:首先,通過在高端裝備的各子系統(tǒng)部件上安裝各類傳感器,構(gòu)建高端裝備狀態(tài)感知系統(tǒng)。該系統(tǒng)能夠獲取各類狀態(tài)參數(shù)并計(jì)算狀態(tài)指標(biāo)特征,對(duì)各子系統(tǒng)進(jìn)行實(shí)時(shí)在線狀態(tài)監(jiān)測,及時(shí)發(fā)現(xiàn)故障并完成報(bào)警任務(wù)。其次,針對(duì)狀態(tài)監(jiān)測過程中出現(xiàn)的故障報(bào)警狀態(tài),借助故障特征提取和診斷技術(shù),對(duì)各子系統(tǒng)進(jìn)行故障診斷并得出相應(yīng)結(jié)論。再次,綜合考慮狀態(tài)監(jiān)測指標(biāo)信息、故障診斷結(jié)論以及相關(guān)機(jī)組評(píng)價(jià)信息,利用健康評(píng)估模型對(duì)各子系統(tǒng)健康狀態(tài)等級(jí)進(jìn)行評(píng)估。對(duì)健康評(píng)估狀態(tài)等級(jí)較低但尚未出現(xiàn)故障的情況,利用故障征兆趨勢變化規(guī)律和故障預(yù)測模型,預(yù)測各子系統(tǒng)未來一段時(shí)間的故障發(fā)生概率及故障類型。最后,綜合各子系統(tǒng)的故障診斷、健康評(píng)估和故障預(yù)測相關(guān)的重要信息,為高端裝備制定維修決策。
智能運(yùn)維 PHM 系統(tǒng)關(guān)鍵技術(shù)實(shí)現(xiàn)
無鍵相觸發(fā)條件的整周期信號(hào)預(yù)處理方法:整周期信號(hào)的獲取是狀態(tài)監(jiān)測中的關(guān)鍵環(huán)節(jié),對(duì)這類信號(hào)進(jìn)行頻譜分析能避免頻譜能量泄露,為評(píng)估復(fù)雜機(jī)械運(yùn)行狀態(tài)提供更完整的數(shù)據(jù)特征指標(biāo)。在研究柴油機(jī) 缸蓋振動(dòng)信號(hào)特性的過程中,發(fā)現(xiàn)不同振動(dòng)沖擊之間的位置關(guān)系實(shí)際上屬于整周期信息,鑒于傳統(tǒng)方法主要依賴鍵相作為參考進(jìn)行整周期信號(hào)的獲取,存在明顯的局限性,本文提出一種無鍵相的振動(dòng)信號(hào)預(yù)處理方法,目的是更準(zhǔn)確地獲取整周期信號(hào)。為達(dá)到這一目的,筆者首先設(shè)計(jì)了 1 個(gè)自適應(yīng)窗口模型,該模型通過計(jì)算各窗口框選的序列信號(hào)的相關(guān)系數(shù)來確定最佳窗口,當(dāng)相關(guān)系數(shù)達(dá)到最大值時(shí),該窗口即為最佳窗口。如公式(1)所示。

式中:rim 為第 i 個(gè)窗口在第 m 個(gè)與 m-1 個(gè)信號(hào)序列的相關(guān)系數(shù) ;xN-m 為長度為 N 的窗口截取的第 m 個(gè)信號(hào)。
基于多分支注意力機(jī)制卷積神經(jīng)網(wǎng)絡(luò)的變工況故障診斷:在變工況條件下,傳統(tǒng)深度學(xué)習(xí)模型在進(jìn)行故障診斷的過程中往往會(huì)遇到困難,為了解決這一難題,筆者借鑒了人類視覺注意力選擇機(jī)制(Attention Mechanism,AM), 并在卷積神經(jīng)網(wǎng)絡(luò)的基礎(chǔ)上,提出了一種新型的深度卷積神經(jīng)網(wǎng)絡(luò)模型,名為“多分支注意力機(jī)制卷積神經(jīng)網(wǎng)絡(luò) ”(Multi-Branch Attention Mechanism Convolution Neural Network, MBAM-CNN)。
該模型的特點(diǎn)在于其注意力機(jī)制,該機(jī)制可以根據(jù)預(yù)先設(shè)計(jì)的函數(shù)來計(jì)算輸入信號(hào)或特征對(duì)目標(biāo)任務(wù)的重要程度系數(shù)。當(dāng)某個(gè)特征的重要程度系數(shù)較大時(shí),它會(huì)被分配更多的注意力,進(jìn)而通過調(diào)整權(quán)重來體現(xiàn)這種注意力的差異。設(shè)輸入為 H=[h1,h2,…,hm],i=1,2,…,m,注意力機(jī)制不是某個(gè)具體運(yùn)算,可以為加性運(yùn)算或點(diǎn)積,也可以設(shè)計(jì)特定模型,以泛指注意力機(jī)制函數(shù)。通過 Softmax 激活函數(shù)得到歸一化的注意力系數(shù),如公式(2)所示。
式中 :αi 為注意力系數(shù) ;fAAT(·)為注意力機(jī)制函數(shù);hi 為輸入信號(hào)。
根據(jù)注意力系數(shù)和輸入信號(hào)得到一種重新分配后的信號(hào),將其稱為“增強(qiáng)表示 z”,其在后續(xù)的網(wǎng)絡(luò)運(yùn)算中起到關(guān)鍵作用。增強(qiáng)表示 z 具有 2 種不同的表現(xiàn)形式,如公式(3)~ 公式(4)所示。
式中 :Z1 為軟注意力;n 為信號(hào)的長度;i 為每個(gè)信號(hào)中的第 i 數(shù)據(jù)。
式中 :Z2 為硬注意力 ;St,j 為該位置的信號(hào)被選中。
在這項(xiàng)研究中,采用了一種特殊的注意力機(jī)制,該機(jī)制是基于簡單的雙層感知器實(shí)現(xiàn)的。這種注意力機(jī)制被分別引入了卷積神經(jīng)網(wǎng)絡(luò)的預(yù)處理層和特征耦合層中。其中預(yù)處理注意力機(jī)制層(AM1)能夠直接對(duì)原始信號(hào)進(jìn)行計(jì)算,生成注意力系數(shù),用于評(píng)價(jià)原始信號(hào)中不同區(qū)域?qū)δ繕?biāo)任務(wù)的重要性。與預(yù)處理層的注意力機(jī)制不同,卷積特征耦合注意力機(jī)制層(AM2)則需要將各種不同尺寸的一維核卷積特征進(jìn)行串聯(lián),再進(jìn)行與上述預(yù)處理層相似的操作,以得到增強(qiáng)表示。在整體模型結(jié)構(gòu)上,設(shè)計(jì)了輸入、預(yù)處理、特征提取、全連接層和輸出層,以保證信息的順暢傳遞和處理。將整周期信號(hào)在 AM1 中進(jìn)行預(yù)處理,得到增強(qiáng)表示 z,設(shè) Sjk =[s1 1 ,…,s1 br ;s2 1 ,s2 2 ,…,s2 br ;… ;sn 1 ,sn 2 ,…,sn br ],j=1,2,…,n;k=1,2,…,br,sj k 表示第 j 個(gè)特征提取模塊的第 k 個(gè)分支卷積網(wǎng)絡(luò)的核大小,n 表示特征提取模塊數(shù)量,br 表示分支網(wǎng)絡(luò)的數(shù)量。通過設(shè)計(jì)一系列不同大小的卷積核,按照一定的滑動(dòng)步長遍歷經(jīng)過預(yù)處理的信號(hào),并將其輸送至特征提取模塊。在這個(gè)過程中,信號(hào)會(huì)依次通過卷積層、特征耦合層和池化層進(jìn)行特征提取、特征增強(qiáng)和池化操作,保證了從原始信號(hào)中提取最具代表性和信息量的特征。在完成特征提取后,這些特征會(huì)被輸送至全連接層和輸出層,以完成模型的整個(gè)訓(xùn)練過程。
基于威布爾比例風(fēng)險(xiǎn)模型的健康評(píng)估方法:為了準(zhǔn)確有效地建立高端裝備的狀態(tài)模型,本文充分利用了歷史數(shù)據(jù),采用了柴油機(jī)的基礎(chǔ)故障率數(shù)據(jù),并結(jié)合信號(hào)退化特征及維修次數(shù),來描述其性能退化過程。在此基礎(chǔ)上,提出了基于威布爾比例風(fēng)險(xiǎn)模型的實(shí)時(shí)故障率模型,用于柴油機(jī)的狀態(tài)監(jiān)測和預(yù)測。如公式(5)所示。
式中 :h 為 t 時(shí)刻故障率的指數(shù)函數(shù);t 為測量時(shí)間;Zt 為 m 個(gè)隨時(shí)間變化的退化特征,Zt =(zt 1,zt 2 ,…,zt m)T ;h0(t)為時(shí)刻 t 的故障率基礎(chǔ)函數(shù);φ(γZt )為關(guān)于退化特征的協(xié)變量函數(shù),可以描述柴油機(jī)的性能退化過程;γ=(γ1,γ2,…,γm)為退化特征對(duì)應(yīng)的協(xié)變量系數(shù);β 為形狀參數(shù);η 為尺寸參數(shù);當(dāng) β>1 時(shí),故障率會(huì)隨時(shí)間逐漸遞增。
協(xié)變量函數(shù)通常采用指數(shù)函數(shù)形式。因此,威布爾比例風(fēng)險(xiǎn)模型如公式(6)所示。
根據(jù)威布爾比例風(fēng)險(xiǎn)模型,能夠計(jì)算基于當(dāng)前監(jiān)測信號(hào)的柴油機(jī)故障率,為柴油機(jī)維修決策提供了參考。此外,還可以利用該模型來計(jì)算柴油機(jī)在任意時(shí)刻 t 的可靠度,具體的計(jì)算方法如公式(7)所示。
式中:R 為 t 時(shí)刻的可靠度 ;u 為 t 時(shí)刻的監(jiān)測信號(hào)。
為了提高對(duì)柴油機(jī)性能退化的描述的準(zhǔn)確性,本文采用了協(xié)變量參數(shù)形式對(duì)監(jiān)測信號(hào)退化特征、維修次數(shù)和負(fù)荷進(jìn)行信息處理。基于這些信息,建立了威布爾比例風(fēng)險(xiǎn)模型。通過該模型,能夠綜合柴油機(jī)的各方面狀態(tài)信息,從而準(zhǔn)確掌握其當(dāng)前的健康狀態(tài)。
二、PHM 系統(tǒng)應(yīng)用驗(yàn)證
基于前文提出的智能運(yùn)維 PHM 系統(tǒng)框架和關(guān)鍵技術(shù),以某型號(hào)船舶發(fā)動(dòng)機(jī)為例,進(jìn)行系統(tǒng)和相關(guān)技術(shù)的初步驗(yàn)證。目的是確認(rèn)該系統(tǒng)在發(fā)動(dòng)機(jī)工況識(shí)別、氣門間隙故障診斷以及健康狀態(tài)評(píng)估等方面的有效性。具體來說,本文將通過特征可視化方法,對(duì)發(fā)動(dòng)機(jī)的工況識(shí)別進(jìn)行驗(yàn)證。其中,對(duì)潛艇、船用等發(fā)動(dòng)機(jī),保持長時(shí)間內(nèi)轉(zhuǎn)速和負(fù)載的穩(wěn)定不變是至關(guān)重要的。因此,工況(包括轉(zhuǎn)速和扭矩)成為運(yùn)行狀態(tài)中常用且關(guān)鍵的性能參數(shù),見表 1。

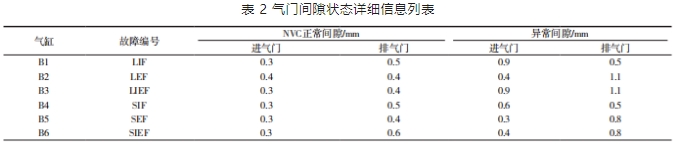
對(duì)發(fā)動(dòng)機(jī)氣門間隙故障診斷的驗(yàn)證,筆者共考慮了 12 種氣門間隙故障。氣門間隙狀態(tài)與對(duì)應(yīng)的故障模擬位置包括正常狀態(tài) NVC(B1-B6)、進(jìn)氣門小間隙故障 SIF(B4)、進(jìn)氣門大間隙故障 LIF(B1)、排氣門小間隙故障SEF(B5)、排氣門大間隙故障 LEF(B2)、進(jìn)排氣門小間隙復(fù)合故障 SIEF(B6)和進(jìn)排氣門大間隙復(fù)合故障 LIEF(B3)。本文提出的 PHM 系統(tǒng)模型在各類故障狀態(tài)的診斷性能上均表現(xiàn)出明顯的優(yōu)勢,特別是在小間隙故障及復(fù)合故障診斷中,其優(yōu)勢尤為突出,見表 2。
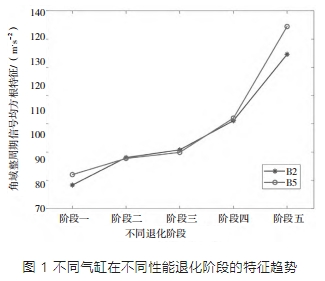
對(duì)發(fā)動(dòng)機(jī)健康狀態(tài)評(píng)估的驗(yàn)證,筆者在保證進(jìn)氣門不變的情況下,調(diào)大了排氣門間隙,并選擇 B2 和 B5 氣缸進(jìn)行退化特征對(duì)比分析。從圖 1 中可以看出,隨著氣門機(jī)構(gòu)從一個(gè)階段退化到下一個(gè)階段,退化特征值呈現(xiàn)出明顯的差異,表現(xiàn)為遞增趨勢。這一結(jié)果有效地驗(yàn)證了退化特征的有效性,見表 3。

三、結(jié)論
當(dāng)前,將智能運(yùn)維 PHM 系統(tǒng)大規(guī)模投入高端裝備制造業(yè)中仍存在很多問題,例如在傳感器安裝位置、采集數(shù)據(jù)質(zhì)量、機(jī)理與數(shù)據(jù)驅(qū)動(dòng)結(jié)合以及人機(jī)交互功能等方面,與國外先進(jìn)系統(tǒng)產(chǎn)品存在差距。本文以振動(dòng)監(jiān)測數(shù)據(jù)為基礎(chǔ),結(jié)合現(xiàn)代信號(hào)處理方法與人工智能技術(shù),重點(diǎn)解決柴油機(jī)狀態(tài)監(jiān)測與故障診斷現(xiàn)存的問題,提出了一種基于深度學(xué)習(xí)的高端裝備智能運(yùn)維 PHM 系統(tǒng)框架,用于高端裝備的信號(hào)采集、故障診斷和健康狀態(tài)評(píng)估。驗(yàn)證結(jié)果表明,該模型能夠高效完成故障診斷和健康狀態(tài)評(píng)估輸出,有效提升智能運(yùn)維 PHM 系統(tǒng)的數(shù)據(jù)處理能力和運(yùn)維結(jié)果的可靠性,具有實(shí)用性。但高端裝備智能運(yùn)維涉及多個(gè)環(huán)節(jié),亟需工業(yè)互聯(lián)網(wǎng)平臺(tái)的支持,以實(shí)現(xiàn)工業(yè)設(shè)備的全覆蓋、動(dòng)態(tài)、連續(xù)監(jiān)控,并對(duì)監(jiān)測數(shù)據(jù)進(jìn)行診斷分析和維修決策。
參考文獻(xiàn)略.